



 產品分類
產品分類
隆隆機器人如何工作
 21
21
 拍明芯城
拍明芯城

趨勢大師隆隆機器人 查看更多 玩具圖片.
照片由 趨勢大師隆隆機器人 是2001年上架最受歡迎的玩具之一。雖然他們的設計中沒有涉及革命性的機械,但他們確實以創新的方式結合了幾種熟悉的技術。這些玩具的主要吸引力在于它們的游戲元素:玩家收集特殊的卡牌來激活不同的戰斗動作并提高機器人的力量水平。
玩具圖片庫
在本期 如何工作,我們將看看使隆隆機器人工作的各種組件。如您所見,Rumble Robot中的基本元素只是我們日常使用的常見電子設備的修改版本。
更多收音機和遙控玩具
訪問消費者指南,查看遙控車、遙控船、遙控氣墊船、遙控坦克、遙控飛機、遙控直升機甚至遙控昆蟲。或者使用遙控玩具套件拼搭自己的玩具。
曝光

隆隆機器人控制器內部大多數遙控玩具由 無線電發射器.當您移動控件時,發射器會以特定頻率向玩具內的無線電接收器發送無線電信號。無線電信號包括一組獨特的電磁脈沖,代表特定的命令。玩具識別此命令并執行它。(見 無線電控制玩具的工作原理 了解詳情。
隆隆機器人在類似的系統上運行,但它們使用 紅外光 而不是無線電波。紅外遙控器就像一個縮影 摩爾斯電碼燈.它通過閃爍一個小的來傳輸消息 發光二極管 (LED)以長閃光和短閃的獨特模式。LED發出的紅外光對我們的眼睛是不可見的,但對機器人的光敏面板卻不可見。傳感器拾取信號并破譯消息。

隆隆機器人控制器的 LED
這與標準中使用的原理相同 電視遙控器.事實上,Rumble Robot控制器看起來很像內部的電視遙控器。塑料控制器外殼包含:
三 電池
一個 發光二極管
兩塊電路板
隆隆機器人(以及大多數其他現代電子產品)使用 印刷電路板.印刷電路板是一塊薄的玻璃纖維,其表面蝕刻著細銅“線”.這些電線將許多電氣元件連接在一個復雜的電路中。
隆隆機器人控制器中的電路板包括:
一 集成電路 (微芯片)
幾個按鈕
當您移動控制器上的塑料墊時, 它們按下電路板的按鈕.按鈕只是固定小導電板的橡膠片。按下按鈕可將導電金屬片向上推到電路板上的接觸點上。通常,每個接觸點都是一個 打開部分 電池和集成電路之間的電路。換句話說,蝕刻的電線不連接,因此電流不能流向微芯片。將導電板壓在導線上閉合電路 - 電流從一根導線流過板到下導線,并移動到微芯片。

當您按下控制器中的按鈕時,它們將完成一個電路。
集成電路對按下的按鈕進行分類,生成適當的命令信號并將其傳遞到晶體管上。晶體管放大信號并激活紅外光。只要按下按鈕,控制器就會繼續發送信號。
在下一節中,我們將看到當該信號到達機器人的光傳感器時會發生什么。
收到的消息
機器人的紅外傳感器在上一節中,我們看到隆隆機器人控制器通過紅外光傳輸命令。每個控制器都有一個 A 設置和一個 B 設置。當您在設置之間切換時,微芯片會更改 閃光模式 的紅外信號。
機器人也有A和B設置。當您將機器人從 A 切換到 B 時,它將忽略 A 模式信號,但會記錄 B 模式信號。如果你有兩個相同型號的機器人,你必須在B上設置一個,在A上設置一個,否則,一個控制器將激活它們。不同的型號使用不同的模式,使戰斗更容易。
紅外接收器的中心元件是一個小 光電管,一種對光有反應的電氣元件。光電管是 光電效應,某些材料響應于特定頻率的光而發射電子。
典型的光電管由光敏 半導體 層,夾在兩個電極之間。電池在兩個電極上發送恒定的電流,無論光電管是否暴露在光線下。當你將光電管暴露在正確的光線下時,電子的提升會放大流過電子的電流。如果燈閃爍和關閉,電流將以相同的模式增加和減少。通過這種方式,光電管將光信號轉換為電信號(參見 太陽能電池的工作原理 有關此過程的更多信息)。

隆隆機器人中的中央電路板
電信號傳遞到機器人的中央集成電路。基于該信號的數字模式,集成電路執行某些動作,例如向前移動,轉身或揮拳。在下一節中,我們將介紹這些操作中涉及的組件。
打好仗

機器人的輪子由兩個電動機驅動。就像無線電控制的汽車一樣,隆隆機器人有四個輪子,由 電動機.如下圖所示,隆隆機器人有兩個驅動電機,它們旋轉一系列 齒輪 移動機器人的輪子。這些電機安裝在機器人的下半部分。
當集成電路接收到適當的信號時,它會向一個或兩個電機發送電流。每個電機都可以在兩個方向上旋轉,具體取決于電流的方向。(見 電動機的工作原理 了解詳情。
通過反轉流向任一電機的電流,集成電路可以改變機器人的方向。如果兩個電機都收到正電流,所有輪子將以相同的方式旋轉,機器人將向前移動。如果兩者都收到負電流,機器人將向后移動。如果一個電機接收到正電流,另一個電機接收到負電流,則兩側的輪子將向相反的方向旋轉,機器人將轉動。如果隨后切換兩個電機的電流,機器人將向相反的方向轉動。
機器人的頭部有第三個電機,可以來回移動手臂。如下圖所示,這種沖孔機構由兩個組成 齒輪齒條齒輪.電機轉動中央齒輪,中央齒輪轉動移動齒條的連接齒輪。

凸耳螺母中的沖孔齒輪機構
在這種設計中,每個齒輪的底座在兩側都有缺口;也就是說,它有兩個部分,牙齒由兩個光滑的部分隔開。帶齒的部分與架子的齒嚙合,齒條連接到機器人的手臂上。當齒嚙合時,齒輪將向后滑動齒條(和手臂)。當齒輪旋轉到光滑部分時,它會釋放齒條。機架是彈簧加載的,因此它們在釋放時向前沖。
這是“凸耳螺母”中起作用的特殊機制。 其他隆隆機器人有不同的沖孔風格,有不同的齒輪布置,但基本元素非常相似。
隆隆機器人游戲的目的是讓你的機器人對對手的機器人進行有效的打擊。在下一節中,我們將看到Rumble Robots如何記錄這些命中。
一個非常明顯的打擊

隆隆機器人中的終端開關:在開關的底部,有一個小金屬彈簧,周圍環繞著一個較大的金屬彈簧。當您按下開關時,兩個彈簧接觸,完成電路。關閉該電路告訴集成電路機器人的開關已被擊中。在隆隆機器人比賽中,目標是對對方機器人進行得分。有三種方法可以得分:
按下機器人的終止開關 - 隆隆機器人在頭部后面有一個小的保險杠開關。當機器人被推到墻上時,或者當另一個機器人從后面撞到它時,開關被按下。這樣就完成了一個電路,該電路告訴集成控制器已得分。
將機器人翻倒 - 每個機器人模型都有一個內部 重力開關.重力開關有一個擺錘元件,當您將機器人側傾 60 度以上時,它會關閉電氣連接。如果一個機器人撞倒另一個機器人,開關就會記錄一個命中。
用激光耗盡機器人的功率點 - 激光實際上只是一個發光二極管,就像控制器中的二極管一樣。當您扣動火災扳機時,集成電路會激活此燈。每個機器人的底座上還有一個光電管,其工作方式與頭部的光電管相同。該激光LED和光電管被校準為與控制器發射器和接收器不同的頻率,因此兩個系統不會相互干擾。當激光接收器從另一個機器人的光束中獲取紅外線時,它會告訴集成電路機器人已被擊中。

機器人的“激光單元”:一個用于發射光束的紅外LED和一個用于接收光束的光電管
要使用激光,啟用打孔機制或增加機器人的力量,玩家必須收集正確的卡片。在下一節中,我們將看到隆隆機器人如何讀取這些卡片。
正確打牌

隆隆機器人配有一副能量卡。使隆隆機器人與其他遙控玩具區分開來的主要因素是 電源卡.每個隆隆機器人都配有一套能量卡,額外的卡在單獨的包中提供。
通過將正確的卡片序列滑過機器人頭部的插槽,玩家可以激活機器人的激光防御、打孔機制、速度和能量點。
每個隆隆機器人的后腦勺都有一個卡片掃描器插槽。
讀卡器就像 條形碼 雜貨店的掃描儀。它有一個微小的光,位于一個微小的光傳感器旁邊。每張卡片都有獨特的黑白線條圖案。當您將卡滑過插槽時,光束會穿過線圖案。白線將大量光線反射回傳感器,但黑線吸收大部分光線(參見 光的工作原理 找出發生這種情況的原因)。
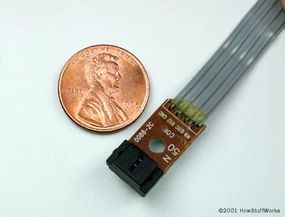
隆隆機器人的條碼掃描器
就像紅外探測器光電管一樣,掃描儀傳感器將光模式轉換為電信號。機器人的集成電路讀取此信號并啟用新的移動或提高機器人的功率水平。當機器人被擊敗,或斷電時,集成電路復位。它必須重新“學習”這些動作。
隨著隆隆機器人的普及,我們肯定會在未來看到許多類似的格斗玩具。與Rumble Robots一樣,這些玩具將標準遠程控制系統與許多互動功能相結合。
責任編輯:David
【免責聲明】
1、本文內容、數據、圖表等來源于網絡引用或其他公開資料,版權歸屬原作者、原發表出處。若版權所有方對本文的引用持有異議,請聯系拍明芯城(marketing@iczoom.com),本方將及時處理。
2、本文的引用僅供讀者交流學習使用,不涉及商業目的。
3、本文內容僅代表作者觀點,拍明芯城不對內容的準確性、可靠性或完整性提供明示或暗示的保證。讀者閱讀本文后做出的決定或行為,是基于自主意愿和獨立判斷做出的,請讀者明確相關結果。
4、如需轉載本方擁有版權的文章,請聯系拍明芯城(marketing@iczoom.com)注明“轉載原因”。未經允許私自轉載拍明芯城將保留追究其法律責任的權利。
拍明芯城擁有對此聲明的最終解釋權。
相關資訊
:
云母電容公司_云母電容生產廠商

開關三極管13007的規格參數、引腳圖、開關電源電路圖?三極管13007可以用什么型號替代?

74ls74中文資料匯總(74ls74引腳圖及功能_內部結構及應用電路)

芯片lm2596s開關電壓調節器的中文資料_引腳圖及功能_內部結構及原理圖_電路圖及封裝

芯片UA741運算放大器的資料及參數_引腳圖及功能_電路原理圖?ua741運算放大器的替代型號有哪些?

28nm光刻機卡住“02專項”——對于督工部分觀點的批判(睡前消息353期)

















 2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)
2012- 2022 拍明芯城ICZOOM.com 版權所有 客服熱線:400-693-8369 (9:00-18:00)


